About Object Detection System
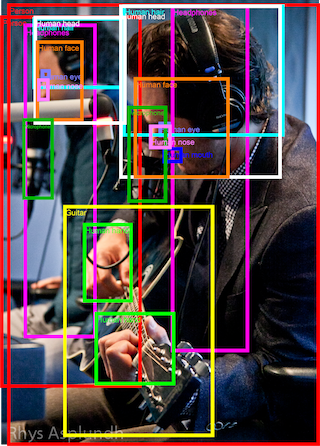
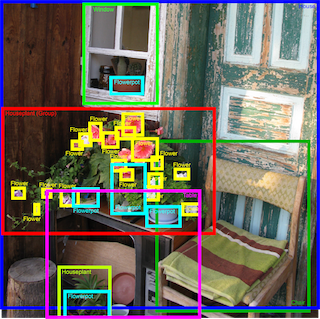
You can demonstrate skills in the field of computer vision with this project. An object detection system can identify classes of objects present within an image.
For example, suppose an image contains a picture of you working on a laptop. In that case, an object detection system should be able to identify and label you (human) and the computer, along with your position in the image.
You can use Kaggle’s Open Images Object Detection dataset for this project. There is a pre-trained object detection model that has been made open-source called SSD. This model was trained on a dataset of everyday objects called COCO and can identify things like tables, chairs, and books.
You can further train the output layer of this model on the Kaggle Open Images dataset to build your object detection system with high accuracy.
Introduction
Computer vision has advanced considerably but is still challenged in matching the precision of human perception.
is a collaborative release of ~9 million images annotated with image-level labels, object bounding boxes, object segmentation masks, and visual relationships. This uniquely large and diverse dataset is designed to spur state of the art advances in analyzing and understanding images.
This year’s open images v5 release enabled the second open images challenge to include the following 3 tracks:
-
Object detection track for detecting bounding boxes around object instances, relaunched from 2018.
-
Visual relationship detection track for detecting pairs of objects in particular relations, also relaunched from 2018.
-
Instance segmentation track for segmenting masks of objects in images, brand new for 2019.
Google AI hopes that having a single dataset with unified annotations for image classification, object detection, visual relationship detection, and instance segmentation will stimulate progress towards genuine scene understanding.
Object Detection Track
In this track of the Challenge, you are asked to predict a tight bounding box around object instances.
The training set contains 12.2M bounding-boxes across 500 categories on 1.7M images. The boxes have been largely manually drawn by professional annotators to ensure accuracy and consistency. The images are very diverse and often contain complex scenes with several objects (7 per image on average).
Please refer to the open images for additional details. The challenge contains a total of 3 tracks, which are linked above in the introduction. You are invited to explore and enter as many tracks as interest you.
The results of this Challenge will be presented at a workshop at the international conference on object detection system.
We are excited to partner with Open Images for this second year of competitions. See link here for last year’s Object detection competition.
Object detection is a computer vision technique for locating instances of objects in images or videos. Object detection algorithms typically leverage machine learning or deep learning to produce meaningful results. When humans look at images or video, we can recognize and locate objects of interest within a matter of moments. The goal of object detection is to replicate
Object detection is a key technology behind advanced driver assistance systems (ADAS) that enable cars to detect driving lanes or perform pedestrian detection to improve road safety. Object detection is also useful in applications such as video surveillance or image retrieval systems.
 Object Detection Using Deep Learning
Object Detection Using Deep Learning
You can use a variety of techniques to perform object detection. Popular deep learning–based approaches using (CNNs), such as R-CNN and YOLO v2, automatically learn to detect objects within images.
You can choose from two key approaches to get started with object detection using deep learning:Create and train a custom object detector. To train a custom object detector from scratch, you need to design a network architecture to learn the features for the objects of interest. You also need to compile a very large set of labeled data to train the CNN. The results of a custom object detector can be remarkable. That said, you need to manually set up the layers and weights in the CNN, which requires a lot of time and training data.
Use a pretrained object detector. Many object detection workflows using deep learning leverage an approach that enables you to start with a pretrained network and then fine-tune it for your application. This method can provide faster results because the object detectors have already been trained on thousands, or even millions, of images.
Detecting a stop sign using a pretrained R-CNN.
Whether you create a custom object detector or use a pretrained one, you will need to decide what type of object detection network you want to use: a two-stage network or a single-stage network.
Two-Stage Networks
The initial stage of two-stage networks, such as identifies region proposals, or subsets of the image that might contain an object. The second stage classifies the objects within the region proposals. Two-stage networks can achieve very accurate object detection results; however, they are typically slower than single-stage networks.

High-level architecture of R-CNN (top) and Fast R-CNN (bottom) object detection.
Single-Stage Networks
In single-stage networks, such as YOLO V2, the CNN produces network predictions for regions across the entire image using anchor boxes, and the predictions are decoded to generate the final bounding boxes for the objects. Single-stage networks can be much faster than two-stage networks, but they may not reach the same level of accuracy, especially for scenes containing small objects.

Overview of YOLO v2 object detection.
Object Detection Using Machine Learning
Machine learning techniques are also commonly used for object detection, and they offer different approaches than deep learning. Common machine learning techniques include:
- Aggregate channel features (ACF)
- SVM classification using histograms of oriented gradient (HOG) features
- The Viola-Jones algorithm for human face or upper body detection
Similar to deep learning–based approaches, you can choose to start with a pretrained object detector or create a custom object detector to suit your application. You will need to manually select the identifying features for an object when using machine learning, compared with automatic feature selection in a deep learning–based workflow.
Machine Learning vs. Deep Learning for Object Detection
Determining the best approach for object detection depends on your application and the problem you’re trying to solve. The main consideration to keep in mind when choosing between machine learning and deep learning is whether you have a powerful GPU and lots of labeled training images. If the answer to either of these questions is no, a machine learning approach might be the better choice. Deep learning techniques tend to work better when you have more images, and GPUs decrease the time needed to train the modes
- Image segmentation and blob analysis, which uses simple object properties such as size, shape, or color
- Feature-based object detection, which uses matching, and to estimate the location of an object
Automatically Label Training Images with Apps
MATLAB provides interactive apps to both prepare training data and customize convolutional neural networks. Labeling the test images for object detectors is tedious, and it can take a significant amount of time to get enough training data to create a performant object detector. The lets you interactively label objects within a collection of images and provides built-in algorithms to automatically label your ground-truth data. For automated driving applications, you can use the and for video processing workflows, you can use the Video labeler app.
Interactively Create Object Detection Algorithms and Interoperate Between Frameworks
Customizing an existing CNN or creating one from scratch can be prone to architectural problems that can waste valuable training time. The enables you to interactively build, edit, and visualize deep learning networks while also providing an analysis tool to check for architectural issues before training the network.
With MATLAB, you can interoperate with networks and network architectures from frameworks like TensorFlow™-Keras, PyTorch and Caffe2 using ONNX™ (Open Neural Network Exchange) import and export capabilities.

Automatically Generate Optimized Code for DeploymentAfter creating your algorithms with MATLAB, you can leverage automated workflows to generate TensorRT or CUDA code with to perform hardware-in-the-loop testing. The generated code can be integrated with existing projects and can be used to verify object detection algorithms on desktop GPUs or embedded GPUs such as the NVIDIA Jetson or NVIDIA Drive platform.
Pros and cons of object detection
Object detection is very good at:
-
Detecting objects that take up between 2% and 60% of an image’s area.
-
Detecting objects with clear boundaries.
-
Detecting clusters of objects as 1 item.
-
Localizing objects at high speed (>15fps)
However, it is outclassed by other methods in other scenarios.
You have to always ask yourself: Do these scenarios apply to my problem?
Either way, here's a cheat sheet you can use when choosing the right computer vision techniques for your needs.
Objects that are elongated—Use Instance Segmentation.
Long and thin items such as a pencil will occupy less than 10% of a box’s area when detected. This biases model towards background pixels rather than the object itself.
Picture: A diagonal pencil labeled on V7 using box and polygon
Objects that have no physical presence—Use classification
Things in an image such as the tag “sunny”, “bright”, or “skewed” are best identified by image classification techniques—letting a network take the image and figure out which feature correlate to these tags.
Objects that have no clear boundaries at different angles—Use semantic segmentation
The sky, ground, or vegetation in aerial images don’t really have a defined set of boundaries. Semantic segmentation is more efficient at “painting” pixels that belong to these classes. Object detection will still pick up the “sky” as an object, but it will struggle far more with such objects.
Objects that are often occluded—Use Instance Segmentation if possible
Occlusion is handled far better in two-stage detection networks than one-shot approaches. Within this branch of detectors, instance segmentation models will do a better job at understanding and segmenting occluded objects than mere bounding-box detectors.
Object detection model architecture
Here's a quick breakdown of different family models used in object detection.
R-CNN Model Family
The R-CNN Model family includes the following:
-
R-CNN—This utilizes a selective search method to locate RoIs in the input images and uses a DCN (Deep Convolutional Neural Network)-based region wise classifier to classify the RoIs independently.
-
SPPNet and Fast R-CNN—This is an improved version of R-CNN that deals with the extraction of the RoIs from the feature maps. This was found to be much faster than the conventional R-CNN architecture.
-
Faster R-CNN—This is an improved version of Fast R-CNN that was trained end to end by introducing RPN (region proposal network). An RPN is a network utilized in generating RoIs by regressing the anchor boxes. Hence, the anchor boxes are then used in the object detection task.
-
Mask R-CNN adds a mask prediction branch on the Faster R-CNN, which can detect objects and predict their masks at the same time.
-
R-FCN replaces the fully connected layers with the position-sensitive score maps for better detecting objects.
-
Cascade R-CNN addresses and quality mismatch at inference by training a sequence of detectors with increasing IoU thresholds.
YOLO Model Family
The YOLO family model includes the following:
-
YOLO uses fewer anchor boxes (divide the input image into an S × S grid) to do regression and classification. This was built using darknet neural networks.
-
YOLOv2 improves the performance by using more anchor boxes and a new bounding box regression method.
-
YOLOv3 is an enhanced version of the v2 variant with a deeper feature detector network and minor representational changes. YOLOv3 has relatively speedy inference times with it taking roughly 30ms per inference.
-
YOLOv4 (YOLOv3 upgrade) works by breaking the object detection task into two pieces, regression to identify object positioning via bounding boxes and classification to determine the object's class. YOLO V4 and its successors are technically the product of a different set of researchers than versions 1-3.
-
YOLOv5 is an improved version of YOLOv4 with a mosaic augmentation technique for increasing the general performance of YOLOv4.
CenterNet
The CenterNet family model includes the following:
-
SSD places anchor boxes densely over an input image and uses features from different convolutional layers to regress and classify the anchor boxes.
-
DSSD introduces a deconvolution module into SSD to combine low level and high-level features. While R-SSD uses pooling and deconvolution operations in different feature layers to combine low-level and high-level features.
-
RON proposes a reverse connection and an objectness prior to extracting multiscale features effectively.
-
RefineDet refines the locations and sizes of the anchor boxes for two times, which inherits the merits of both one-stage and two-stage approaches.
-
CornerNet is another keypoint-based approach, which directly detects an object using a pair of corners. Although CornerNet achieves high performance, it still has more room to improve.
-
CenterNet explores the visual patterns within each bounding box. For detecting an object, this uses a triplet, rather than a pair, of keypoints. CenterNet evaluates objects as single points by predicting the x and y coordinate of the object’s center and it’s area of coverage (width and height). It is a unique technique that has proven to out-perform variants like the SSD and R-CNN family.
Note : Find the best solution for electronics components and technical projects ideas
keep in touch with our social media links as mentioned below
Mifratech websites : https://www.mifratech.com/public/
Mifratech facebook : https://www.facebook.com/mifratech.lab
mifratech instagram : https://www.instagram.com/mifratech/
mifratech twitter account : https://twitter.com/mifratech
Contact for more information : [email protected] / 080-73744810 / 9972364704
.jpg)