The robotics and automation industry which is ruled the sectors from manufacturing to household entertainments. It is widely used because of its simplicity and ability to modify to meet changes of needs. The project is designed to develop a robotic vehicle using android application for remote operation attached with wireless camera for monitoring purpose. The robot along with camera can wirelessly transmit real time video with night vision capabilities. This is kind of robot can be helpful for spying purpose in war fields. The wifi technology is relatively new as compared to other technologies and there is huge potential of its growth and practical application. The android application loaded on mobile devices, can connect with security system and easy to use GUI. The security system then acts on these command and responds to the user. The CMOS camera and the motion detector are attached with security system for remote surveillance. A robot is a machine capable of carrying out a complex series of actions automatically, especially one programmable by a computer. A robot can be controlled by a human operator, sometimes from a great distance. In such type of applications wireless communication is more important. This paper also shows general idea and design of the robot. Surveillance security robot provides safety like man. Automatic patrolling vehicle for periodic patrolling in defined or a restricted area, the patrolling vehicle can move automatically to monitor the dead zones and capture the images by using the camera.
Robots can be classified into different types based on their environment and mechanism of interaction such as mobile and fixed robot of which mobile robot can be further classified as aquatic, terrestrial and airborne. The terrestrial robots are much in use and their applications are vast in each and every field, they are of two types (i) wheeled and (ii) legged each having a different use. Robots are being used in variety of industrial applications for various activities like pick and place, painting, assembling of subsystems and in hazardous places for material handling etc. Nowadays robots in the use of surveillance is emerging because of their miniature size allowing them to enter in tunnels, mines and small holes in building and also have capability to survive in harsh and difficult climatic conditions for life long time without any defect and causing no harm. This project’s main functionality is to deal with tough situations where human beings cannot handle situations like darkness, entering narrow and small places and detecting hidden bombs etc. Such hostile situation is occurring day by day in different parts of the world through terrorist attack or in natural catastrophes. This designed system is connected to a remote computer wirelessly through which the whole controlling of the system response is done. The project is also designed to search invisible metal stuffs from where people are not capable to reach and it is so designed to work in environment where visible light will not be available. The proposed system consist of two units mainly a robotic unit and a remotely control unit. The robotic unit is consisting of the webcam, sensors and the heart of the project, raspberry pi along with the PCB containing motor driven IC and voltage regulator circuitry. The rest of the paper is organized as follows: we review the related works in Section II. Section III presents about the surveillance robot in detail. Section IV, presents the conclusion and future work of the paper.
Service robots assist human beings, typically by performing a job that is dirty, dull, distant,dangerous or repetitive, includinghousehold chores. They typically are autonomous and/or operated by a built-in control system, with manual override options. The International Organization for Standardization defines a “service robot” as a robot “that performs useful tasks for humans or equipment excluding industrial automation applications”. The surveillance robot that is used in defense comes under the service robot that does the dangerous job. These robots are usually unmanned and are operated by a remote desktopgenerally, there are three kinds of unmanned machines used in the military operations:
• Unmanned Ground Vehicle (UGV): They are used for ground purposes. They can carry heavy load, move on uneven terrains and have various sensors and cameras fitted on them.
• Unmanned Aerial Vehicle (UAV): They are used to carry aerial weapons and flying machines.
• Unmanned Underwater Vehicle (UUV): They are submarines or machines, which can survey under water. These unmanned robots are equipped with the necessary sensors and the motor system and they are provided with a wireless cameras will send back real time video and audio inputs that can be seen on a remote monitor in the base station from where the robot is being controlled. These are widely used in battle field.
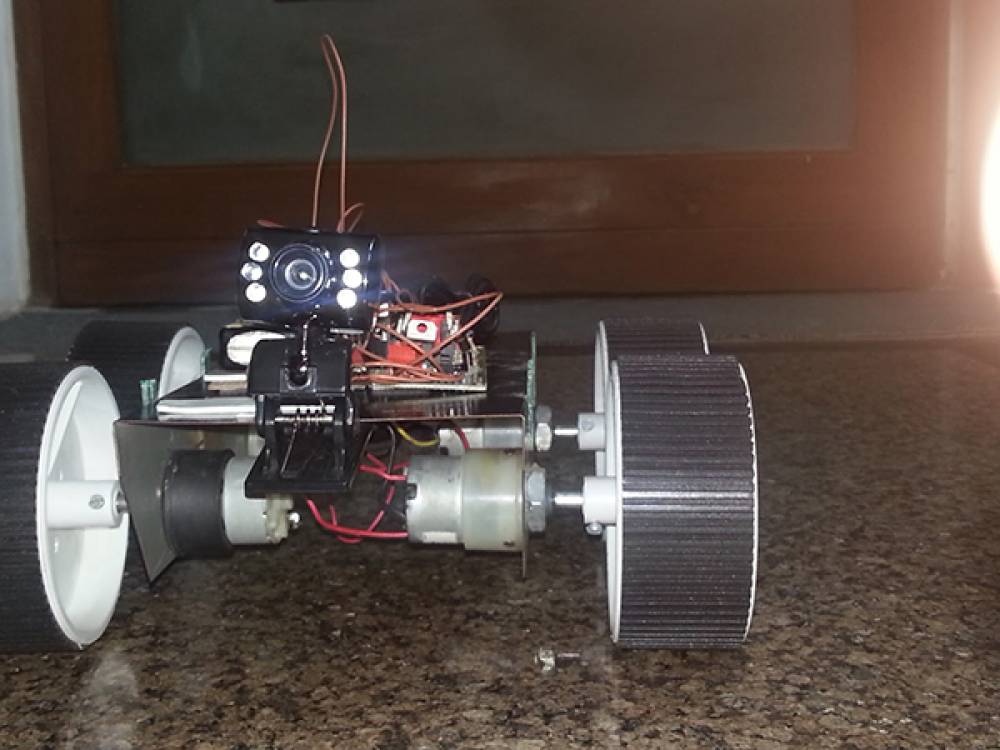
DEFINITION: The surveillance robot is designed to be multitasking, cost efficient and feasible machine that can be implemented for the military purpose. These machines replaces the Indian army soldiers and dogs that are used at the borders during the time of war saving the lives from opponents or enemy nations and from environmental condition such as extreme cold and heat.These system consists of two units mainly a robotic unit and a remotely control unit.The Robotic unit consists of a microcontroller, the microcontroller here is the raspberry pi forming the central control of the system which is connected to a remote network wirelessly and is controlled by a remote user. The system is driven by a motor and the power supply is provided by a 12v battery. The system is equipped by different sensor each of different use the IR sensor is used to sense the presence of obstacles and it automatically redirects its way in the obstacles, the PIR sensor detects the presence of living objects in and around all these are captured by a pi vision camera, the system has metal detecting sensor which detects the presence of any metal things underground angives an alert indicating the presence of the metal and can be viewed on the monitor screen this forms the hardware part of the system . The software part is the web application which displays the status of the IR, PIR and metal detecting sensor and the images captured by the pi camera is displayed on the screen on the webpage. The web application has a added advantage of storing the images captured and gives the detailed history of the pictures captured before.
SENSOR MODULE
PIR SENSOR :-This sensor is used to detect the movement of human beings in and around it. This emits the radiation and detects the heat and temperature of the body and finds the object before it
IR SENSOR :-This sensor is also used to detect the obstacles coming on the both sides of the device and detects the motion of the object. It does not emit the radiation but it measures the radiation of the object before it.
PROXIMITY SENSOR :-This sensor is used to detect the metal objects around it without having any Physical contact with them and it emits the electromagnetic radiation and detects the objects
CAMERA INTERFACE MODULE PI CAMERA :-This vision sensor PI camera is used to capture the images and motions of the object before it and this is set on the top of the system and it can be moved in and around to capture the images in different locations and it sends those recordings to the web server for later purpose.
RASPBERRY PI :-This Raspberry pi board is used as an interface between the software and hardware and this has an inbuilt wireless controller and also a Bluetooth controller which supports the PI camera and connects all the sensors with the system hardware.
ARaspberry pi 3 :-The Raspberry Pi 3 Model B is the third generation Raspberry Pi. This powerful creditcard sized single board computer can be used for many applications and supersedes the original Raspberry Pi Model B+ and Raspberry Pi 2 Model B. Whilst maintaining the popular board format the Raspberry Pi 3 Model B brings you a more powerful processer, 10x faster than the first generation Raspberry Pi. Additionally it adds wireless LAN & Bluetooth connectivity making it the ideal solution for powerful connected designs.With its built-in wireless connectivity, the new Raspberry Pi is clearly positioned as a low-cost hub for Internet of Things devices, or as the flexible, low-cost basis of new types of connected gadgets. The new bump to a 2.5 amps power source means it will be able to power more complex USB devices without the need for a second power cable.
Infrared Sensor:- Infrared Obstacle Avoidance Proximity Sensors Module has built-in IR transmitter and IR receiver that sends out IR energy and looks for reflected IR energy to detect presence of any obstacle in front of the sensor module. The module has on board potentiometer that lets user adjust detection range. The sensor has very good and stable response even in ambient light or in complete darkness. The sensor module can be interfaced with Arduino, Raspberry Pi or any microcontroller having IO voltage level of 3.3V to 5V.
PIR Sensor :-PIR sensor detects a human being moving around within approximately 10m from the sensor. This is an average value, as the actual detection range is between 5m and 12m.PIR are fundamentally made of a pyro electric sensor, which can detect levels of infrared radiation. For numerous essential projects or items that need to discover when an individual has left or entered the area. PIR sensors are incredible, they are flat control and minimal effort, have a wide lens range, and are simple to interface .
CONCLUSION
This paper presents an overview of the design, implementation, testing, and performance of an innovative robotic surveillance vehicle controlled wirelessly by a remote user, developed for the purpose of directing the movement and detection of the living, nonliving and metal objects and displaying status feedback to the operator through a web application. Since these robotsare implemented at the border region they should be designed to be water proof and should be able to loco mote in the rugged surface As they replace humans at the battle region it is necessary that the robot will be defense himself and protect our nation from the enemy. To make robot self-defense they can be designed to be equipped with a robot laser gun. Being a bomb disposal robot, it requires very fast movement. This is required as the bomb disposal squad have very less time to defuse the bomb and save the life of the human’s. Therefore a fast robot is shall to be successful to dispose the bomb.
Note : Find the best solution for electronics components and technical projects ideas
keep in touch with our social media links as mentioned below
Mifratech websites : https://www.mifratech.com/public/
Mifratech facebook : https://www.facebook.com/mifratech.lab
mifratech instagram : https://www.instagram.com/mifratech/
mifratech twitter account : https://twitter.com/mifratech
Contact for more information : [email protected] / 080-73744810 / 9972364704